¿Cómo funciona la Brain-to-Vehicle technology (B2V) de Nissan?
La automovilística Nissan iniciaba el año presentado el primer concepto “Brain-to-Vehicle”, una gran revolución para el sector que conectará el cerebro del conductor al vehículo cambiando radicalmente la forma en la que interaccionamos con los automóviles. El objetivo, más que sustituir al conductor con un piloto automático, es tener acceso a sus intenciones entre 0,2 y 0,8 segundos antes de que las ejecute para así anticiparse y conseguir una conducción personalizada, más cómoda y segura. El proyecto de aplicación de los interfaces cerebro computador presenta avances en tecnología wearable de medición de la actividad cerebral, en procesamiento de la actividad cerebral para obtener la anticipación al movimiento, y en nuevas formas de realizar el control compartido con los automóviles. Conectar el cerebro al automóvil para aumentar el estilo de conducción es, sin duda, un tema que dará que hablar en los próximos años.
El proyecto de aplicación de los interfaces cerebro computador presenta avances en tecnología wearable de medición de la actividad cerebral, en procesamiento de la actividad cerebral para obtener la anticipación al movimiento, y en nuevas formas de realizar el control compartido con los automóviles. Conectar el cerebro al automóvil para aumentar el estilo de conducción es, sin duda, un tema que dará que hablar en los próximos años.
El objetivo del proyecto: Brain-to-Vehicle (B2V)
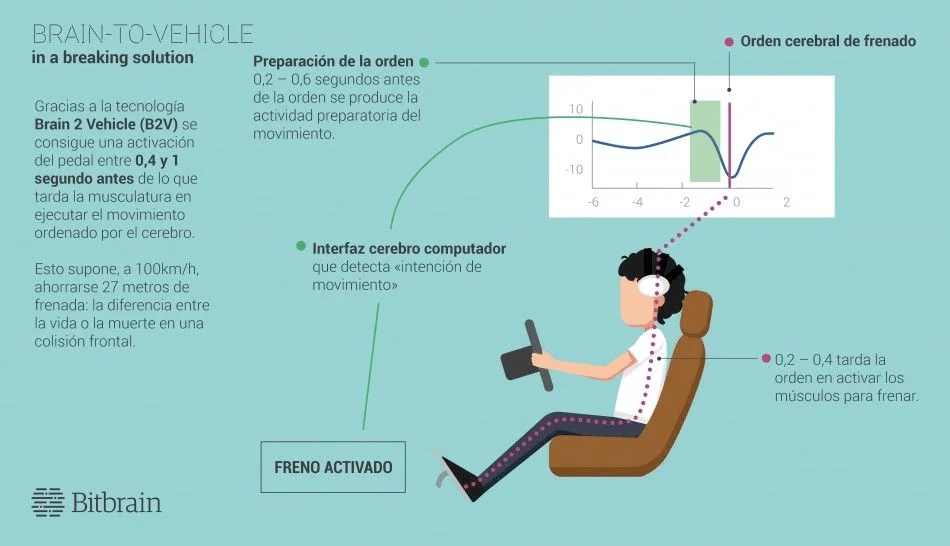
Desde que el cerebro da una orden de movimiento hasta que nuestros músculos la ejecutan pasan entre 0,2 y 0,4 segundos, tiempo que tarda la orden en recorrer el sistema nervioso desde el cerebro hasta la activación de la musculatura. Además, antes de que el cerebro de la orden, entre unos 0,2 a 0,6 segundos se producen las señales cerebrales de “preparación” del movimiento. En este caso, entre 0,4 y 1 segundo antes de que un conductor pise el pedal del freno ya se pueden interpretar las señales para identificar la intención del conductor, y así el coche podría empezar la frenada instantáneamente. A 100km/h esto supone ahorrarse 27 metros de frenada, la diferencia entre la vida o la muerte en una colisión frontal. Esto puede extenderse a cualquier giro o maniobra que vaya a llevar a cabo el coche, dado que involucra un comportamiento motor con nuestros brazos o piernas que podría ser anticipado por el vehículo.
Casi un segundo antes de que un conductor pise el pedal del freno ya se puede saber la intención del conductor, y el coche podría empezar la frenada instantáneamente.
Un aspecto muy importante de la integración de esta información con el automóvil es que está basado en un control compartido, es decir, el conductor y el coche comparten la conducción para aumentar la experiencia y la seguridad. Esto representa un nuevo concepto alternativo al conocido control automático, cuyo objetivo es reemplazar al conductor por un piloto automatizado. En este sentido, el Dr. Lucian Gheorghe, Senior Innovation Researcher de Nissan afirma “las posibles aplicaciones de la tecnología son increíbles. Esta investigación será un catalizador para la innovación de Nissan dentro de nuestros vehículos en los próximos años".
Estos principios de funcionamiento del cerebro y su relación con la conducción forman la base del proyecto “Brain-to-Vehicle” que Nissan presentó en CES 2018, la mayor feria mundial de electrónica del consumidor. El objetivo del proyecto es aumentar la experiencia de conducción, mejorando así la seguridad y comodidad del usuario. Este avance de Nissan es un primer hito desarrollado en colaboración con Bitbrain, el Instituto Federal Suizo de Tecnología y el Instituto Nacional de Investigaciones Científicas de Canadá.
Este proyecto se asienta sobre cuatro pilares básicos de investigación y desarrollo:
- Una nueva tecnología wearable de medición de la actividad cerebral de electroencefalografía (EEG), inalámbrica, cómoda para llevar puesta durante largo tiempo, y muy fiable para capturar el comportamiento natural en un coche.
- Un análisis de datos de la actividad cerebral en tiempo real capaz de detectar la anticipación al movimiento del conductor.
- Nuevos procedimientos de control compartido entre el automóvil y el conductor utilizando la información cerebral.
- Nuevos sistemas de integración y pruebas basados en simulaciones y coches reales.
Tecnología EEG minimalista optimizada para el proyecto
En esta línea, Bitbrain ha desarrollado junto a Nissan una innovadora neurotecnología de EEG wearable y minimalista con sensores secos optimizada para medir actividad cerebral relacionada con el movimiento. Se trata de una tecnología de EEG que no necesita aplicar sustancias conductoras electrolíticas para su funcionamiento, es muy cómoda y ergonómica, está diseñada para capturar el comportamiento natural del conductor, y que dispone además de un diseño tecnológico y más discreto que cualquier otra tecnología de EEG existente. Se coloca en menos de dos minutos de media y puede trabajar hasta ocho horas de forma continuada transmitiendo la actividad cerebral del conductor al bluetooth del coche.
Este proyecto necesitaba que el sistema EEG tuviese tres propiedades clave.
- Aceptabilidad por parte de los usuarios finales: el equipo es cómodo de llevar, presenta una estética “amable” para los usuarios finales, cuenta con los mínimos sensores necesarios para no sobre-cargar el equipo. Todo ello además, sin la necesidad de utilizar sustancias electrolíticas para su funcionamiento y con un tiempo de colocación de dos minutos de media.
- Insensibilidad a los artefactos de movimiento producidos por ruido que se produce al medir el EEG en condiciones naturales con movimiento. El sistema de EEG no tiene cables (usual fuente de ruido en movimiento) y dispone de un innovador apantallamiento activo que reduce el ruido producido por cualquier señal de origen no neuronal.
- Medición fiable de los procesos cerebrales necesarios: el EEG es capaz de medir los movement-related cortical potentials (MRCPs) y las sincronizaciones/desincronizaciones motoras (ERD/ERS). En particular, los MRCPs son extremadamente complejos de medir con buena calidad utilizando tecnología de EEG seca.
A continuación se muestra un ejemplo de uso de la tecnología en un prototipo intermedio.
El desarrollo de esta tecnología wearable de EEG es un claro avance para este proyecto y en general, para la aplicación de estas tecnologías fuera del laboratorio. Por un lado, permite capturar el comportamiento natural del usuario durante la conducción, y por otro, consigue medidas de EEG con una fiabilidad sin precedentes necesarias para capturar los procesos cerebrales motores y cognitivos necesarios para acomodar la conducción del automóvil.
El nuevo wearable EEG minimalista es un gran avance hacia equipos de medición cerebral fiables y adaptados para aplicaciones de la vida diaria.
La interfaz cerebro computadora para anticipación del movimiento
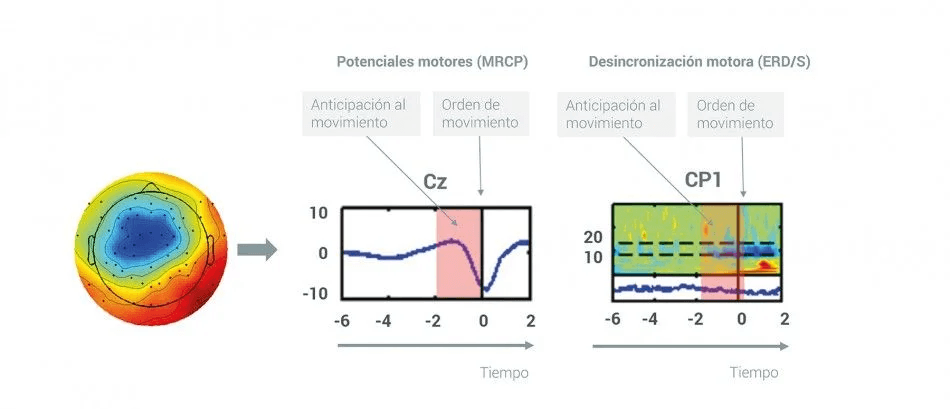
Para anticipar las intenciones del usuario, el equipo de Nissan ha utilizado la actividad cerebral preparatoria que precede a la ejecución del movimiento. Esta actividad ocurre principalmente sobre la corteza motora y se identifica a través de dos correlatos neurales del EEG: potenciales corticales de baja frecuencia (MRCPs) y desincronizaciones motoras (ERD/S). Una forma estándar de observar estos procesos consiste en agregar varias repeticiones de un mismo movimiento y mostrar lo que se conoce como el Grand Average.
La siguiente figura muestra la forma que tienen estos dos procesos cerebrales cuando una persona comienza a caminar (inicia el movimiento de su pierna derecha), medidos sobre la corteza motora en el área que corresponde a las piernas. Notar que el cero en el eje horizontal se corresponde al lanzamiento de la orden, y cómo se observan claramente los potenciales pre-motores (preparación del movimiento) que preceden a la orden. El objetivo de la interfaz cerebro computadora es medirlos y decodificarlos lo más rápidamente posible.
A continuación se muestra un ejemplo de este proceso en un contexto de aplicación diferente como un paciente de accidente cerebro vascular (ver publicación científica). El cero es el inicio de la orden de movimiento, la línea amarilla representa la activación de los músculos de su brazo (EMG, actividad electromiográfica) y la línea verde es la decodificación de la actividad cerebral (obtenida con la interfaz cerebro computadora). El valor de la línea amarilla y la verde indica la probabilidad del movimiento. Notar cómo se decodifica la intención antes de que se produzca el movimiento.
Como procesos cerebrales se utilizaron los potenciales corticales de baja frecuencia (MRCPs) y desincronizaciones motoras (ERD/S).
La adaptación del sistema al conductor
A pesar de lo que puedan sugerir las figuras anteriores, decodificar la actividad cerebral de anticipación del movimiento medida en el EEG es un proceso muy complejo.
- En primer lugar, la decodificación trabaja sobre la actividad generada por un único movimiento, en lugar de sobre un promediado, por lo que la relación señal a ruido es más baja (es decir, la señal de EEG es bastante más ruidosa de lo que se representa en las figuras).
- Segundo, en una aplicación como la del frenado de Nissan no se conoce a priori el momento en que la persona va a frenar y, por lo tanto, debemos decodificar de forma continua sus intenciones (al no haber un intervalo temporal en el que identificar la decodificación se disminuye la precisión de la detección).
- En tercer lugar, el cerebro de cada persona es diferente y los procesos de movimiento antes mencionados se presentan también de forma diferente (tienen una gran variación inter- e intra-personal).
Para abordar estos problemas, los algoritmos para anticipar el movimiento se basan en técnicas de procesado de señal con aprendizaje automático (machine learning), las cuales requieren realizar una fase de calibración específica para cada sujeto.
Esta fase consiste en la realización por parte del usuario de un conjunto de movimientos iguales a los que se quieren decodificar. Durante la ejecución de estos movimientos se adquiere la señal cerebral así como información acerca del movimiento de la persona. Estas señales servirán de ejemplo para entrenar al sistema de detección. Una vez que tenemos el sistema entrenado, es posible decodificar en tiempo real cuando la persona quiere moverse.
En el caso de la asistencia a la conducción, es posible utilizar un simulador para entrenar la interfaz cerebro ordenadora. Nissan, de hecho, utilizó un simulador de coches para entrenar y evaluar la detección de la anticipación de movimiento. Durante CES, las personas que querían probar el Brain-to-Vehicle interface debían en primer lugar calibrar el sistema siguiendo las instrucciones del simulador mientras se registraba su actividad cerebral y los movimientos del volante y frenos. Una vez que el sistema detectaba que el entrenamiento era satisfactorio, la persona estaba lista para conducir el simulador con asistencia directa de su cerebro, sin pasar por su cuerpo.
Nissan utilizó un simulador de coches para entrenar las técnicas de aprendizaje automático a detectar la anticipación de movimiento.
Otros proyectos de cerebro y biosensores en automoción
Nissan no es el único fabricante de coches que está interesado en utilizar sistemas de EEG en sus vehículos. Ford, por ejemplo, en colaboración con el King’s College de Londres ha comparado la atención y tiempo de reacción de pilotos de circuito profesionales con los de conductores normales. Para ello, han utilizado sistemas de EEG y de realidad virtual. Los resultados muestran que, a altas velocidades, los pilotos son mucho mejores a la hora de ignorar distracciones. Aunque de momento el interés de Ford está pensando en utilizar este tipo de sistemas para mejorar el rendimiento de sus pilotos de competición, el mundo de las carreras siempre ha sido un lugar de innovación previo a su desarrollo para el resto de conductores.
Si Ford quiere monitorizar y mejorar las capacidades de los conductores, Audi ha utilizado en el proyecto 25th Hour sistemas de EEG para evaluar la experiencia de usuario en coches autónomos. Los fabricantes saben que con el cambio de paradigma el tiempo en el coche va a ser utilizado de forma muy diferente al actual. Utilizando una simulación futurista de un coche autónomo, Audi ha estudiado las expectativas de la generación Millenial en estos coches, centrándose en una primera fase en cómo generar entornos que favorezcan la productividad. Las medidas de EEG muestran distintos niveles de demanda cognitiva en función de los estímulos que el coche presenta (vista de conductor, espacio de relajación, etc).
En otro proyecto también ejecutado por Bitbrain y en colaboración con Ogilvy se desarrolló un neuroconfigurador de coches para la automovilística Seat para adaptar las características del coche al temperamento de los conductores. La tecnología se presentó en el Paris Motor Show y la utilizaron para configurar de forma autónoma más de 8.000 personas en menos de 15 días, lo que supone un hito en el uso de interfaces cerebro-computador (tanto por la intensidad de uso como porque los participantes lo usaban autónomamente y sin necesidad de personal técnico). La tecnología estimaba el temperamento de los conductores en un proceso en el que se le presentaban videos (estímulos) mientras se les registraba su respuesta cerebral con un wearable de EEG minimalista.
A día de hoy se están presentando muchas innovaciones para mejorar la interacción de los humanos con los automóviles, y qué duda cabe de que introducir información del cerebro abre un infinito campo de investigación y líneas futuras de aplicación.
Recursos relacionados:
- ¿Qué es el EEG y para qué sirve?: Una introducción al EEG: cómo funciona, sus principales aplicaciones en medicina e investigación y los tipos de dispositivos disponibles.
- Sincronización de EEG con biosensores (ECG, EMG, Eye Tracking...) y software: Entiende qué es la sincronización neuronal en EEG y por qué es clave para estudiar la conectividad cerebral.
- Fatiga y atención al volante: detección en tiempo real mediante EEG: Cómo el EEG y la IA permiten detectar la fatiga en tiempo real en conductores, pilotos y otros profesionales de alto riesgo.
- Neurofeedback basado en BCI para la mejora cognitiva: Cómo el neurofeedback basado en BCI utiliza el EEG en tiempo real para entrenar la actividad cerebral y mejorar la memoria, la atención y el rendimiento cognitivo.
- Caracteristicas principales de los amplificadores de EEG: Un resumen técnico sobre los amplificadores EEG, explicando cómo magnifican las señales neuronales a nivel de microvoltios para su correcta digitalización y posterior análisis de datos.
- Capa de sensores en sistemas EEG: características técnicas clave: Conoce la capa de sensores en dispositivos EEG: tipos, materiales y su impacto en la calidad de la señal.
- La importancia de la ciberseguridad en brain-computer interfaces: Una exploración de los riesgos de privacidad y seguridad que plantean las interfaces cerebro-computadora, desde el robo de datos neuronales hasta el brain hacking, y cómo prevenirlos.
- La historia olvidada de las ondas cerebrales alfa: La historia de las ondas cerebrales alfa, desde su descubrimiento en los años 20 hasta su popularidad contracultural, y lo que la ciencia moderna del neurofeedback nos dice sobre ellas.
